.随着L2及以上级别智能驾驶功能(如NOA领航辅助驾驶)的快速渗透,车辆对环境感知的需求大幅提升。NOA功能通常需要多颗摄像头协同工作,例如高速NOA需8-12颗摄像头,城市NOA需更多,这直接推动了车载摄像头用量的增加。
.随着自动驾驶技术向L3、L4级别发展,对传感器的依赖度大幅增加,对摄像头清洁度的要求也更为严格。高阶自动驾驶系统需要实时、准确的环境感知信息,任何污垢都可能引发安全问题。因此,自清洁系统成为高阶自动驾驶车辆的标配需求之一。
")
")
随着L2及以上级别智能驾驶功能(如NOA领航辅助驾驶)的快速渗透,车辆对环境感知的需求大幅提升。NOA功能通常需要多颗摄像头协同工作,例如高速NOA需8-12颗摄像头,城市NOA需更多,这直接推动了车载摄像头用量的增加。
.随着L2及以上级别智能驾驶功能(如NOA领航辅助驾驶)的快速渗透,车辆对环境感知的需求大幅提升。NOA功能通常需要多颗摄像头协同工作,例如高速NOA需8-12颗摄像头,城市NOA需更多,这直接推动了车载摄像头用量的增加。
.随着自动驾驶技术向L3、L4级别发展,对传感器的依赖度大幅增加,对摄像头清洁度的要求也更为严格。高阶自动驾驶系统需要实时、准确的环境感知信息,任何污垢都可能引发安全问题。因此,自清洁系统成为高阶自动驾驶车辆的标配需求之一。

目前微碰撞传感器在汽车应用里包括HOD方向盘脱手检
雨量和光传感器是小型光电模块,通常位于车辆后视镜内
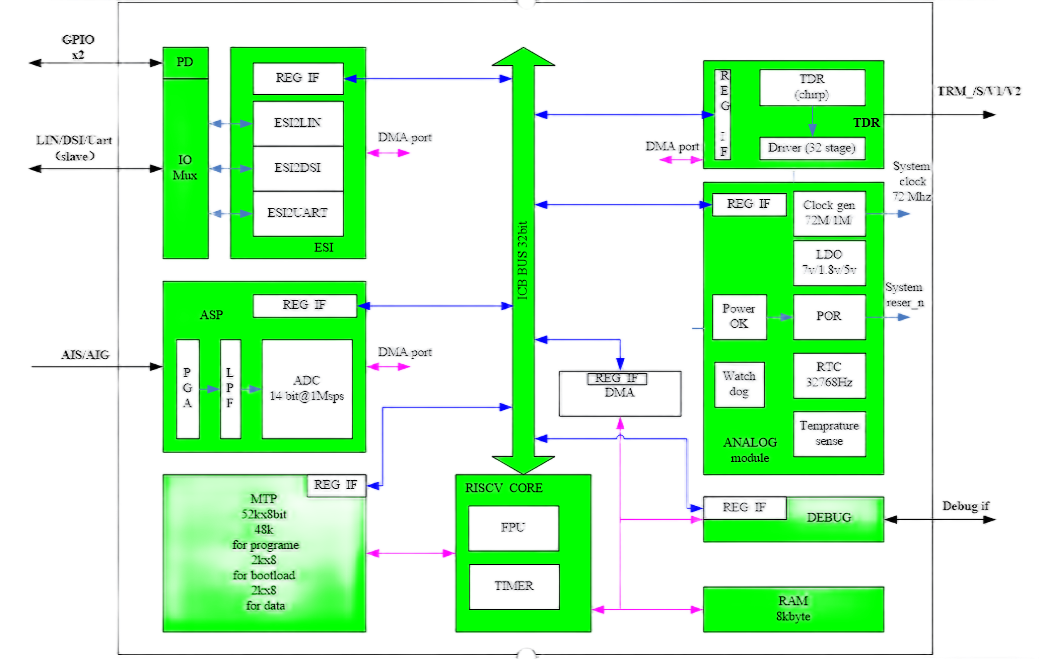
特性:● 存储器– MTP:非易失性存储器ECC,
随着L2及以上级别智能驾驶功能(如NOA领航辅助驾